planning a path
To navigate the course and efficiently detect weeds, our group decided to implement the bug algorithm. The robot will travel to five points, deviating to exterminate a weed or right/left wall following when an obstacle is encountered.
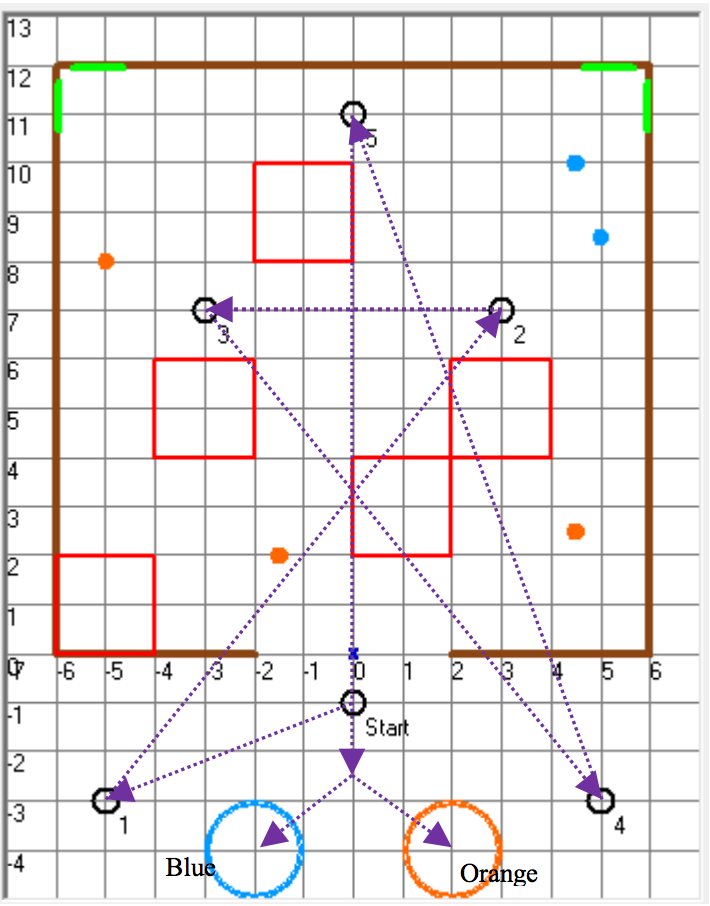
avoiding obstacles
The robot is equipped with a LADAR sensor that checks the left, right, and front of the robot every millisecond. If the left LADAR reading is less than the right LADAR reading and is below a certain threshold value, the robot will begin left wall following until it has circumnavigated the obstacle in its path (vice versa for right wall following around obstacles). When the robot is passing through a narrow pathway or is walled in by obstacles on three sides, it will turn randomly to avoid the obstacles and will return to the path shown in the picture above.
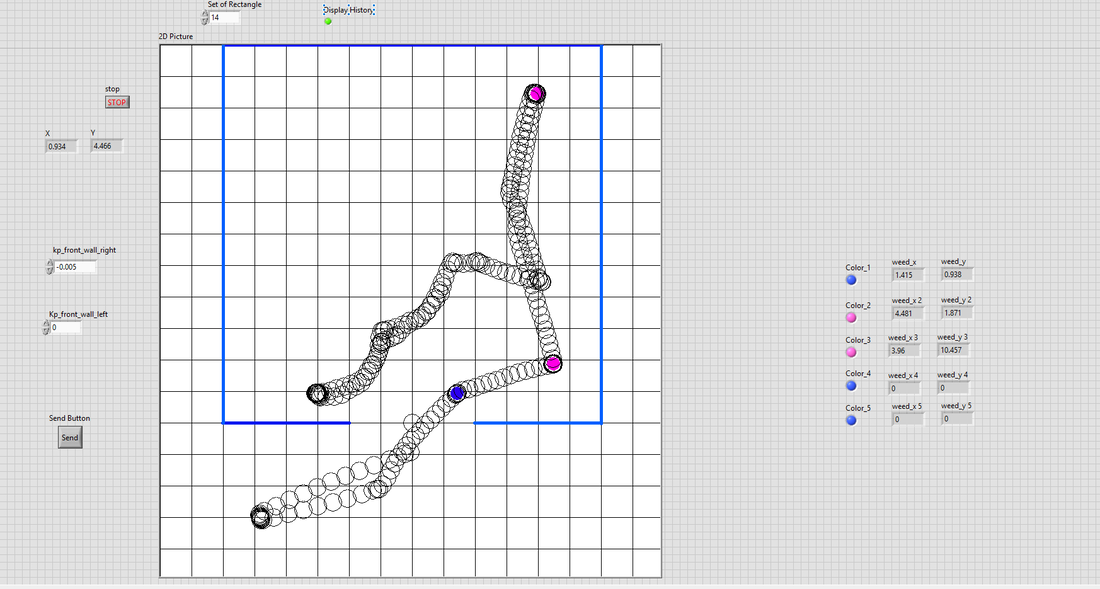
Exterminating weeds
As the robot is moving towards a planned point, the robot's camera checks for weeds by detecting the presence of bright blue or pink pixels in its line of sight. The robot then moves towards the weed, rolls over it for a moment, and eliminates it. Servo motors attached to the robot indicate the number and color of weed killed. The path the robot has traveled as well as the location and color of the weeds is displayed in our LabVIEW program.
Project files located below.
| source.zip |
